

This page is definitely under construction. See also the Discussion Topic in the CrustCrawler Forums.
(see the discussion topic for more informaiton on the quote)
It's been a while. I've added the following pages:
The most significant change is the top deck. I reverse engineered the top deck, and had some parts made on our laser at work. They were kind enough to find some drop, and snuck the laser time in with another nest. The new top deck is two pieces, and outer ring that takes care of the "structural" requirements and holds the Nomad together, and in inner "plate" that can be easily removed to get at the electronics, or exchanged, as shown below. I've got two inner plates at this time. The SG6-UT arm is mounted on one (shown below on the left), and the other is "blank" for now, but will carry an IP Camera (see the Future Plans page).
I haven't done a lot with the software side, but did get a walking sequencer working with the inverse kinematics. Communication is still slow, as all the calculations and sequencing are done on the PC side, and servo position commands are sent to the Nomad via serial communications. This will need to be improved, but not until a few other things are defined and worked out.
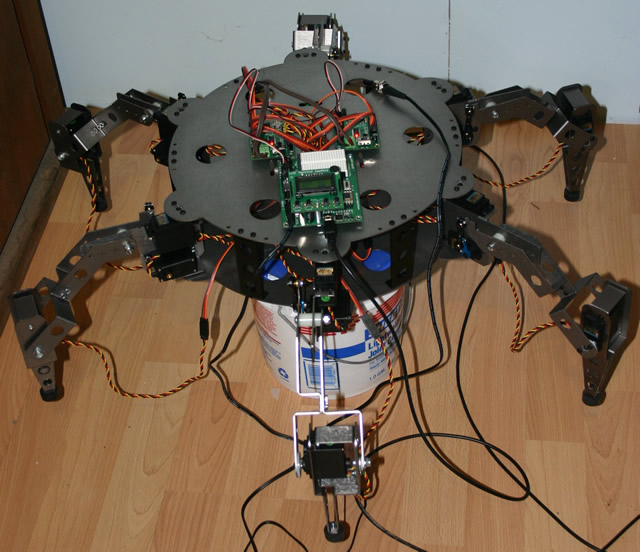
Here's a pair of current pictures, one with a "plain deck" and one with the SG6-UT Arm in place.
I've get the new "Brain" in place, and started working on the Inverse Kinematics: Lobotomy Completed
I am under attack! See this special bulletin: Lobotomy Protesters
For an update on work on the Nomad, see: Pre Lobotomy Development
One of the minor setbacks in getting started was the re-construction of a work area. To see the story of the work area, and a couple pictures (including an empty 200 Gallon Aquarium) see the Work Bench page.
The plan was to do the initial build "per the book", including some initial walking steps with the PBasic Walking Engine. The build went very well per the instructions. For some notes on the build, see the Initial Build page.
Because I have all 18 servos upgraded to the "Robot Servos" (Hi-Tec HSR-5995TG), I had to make some modifications to the walking engine. See the description here. (The Walking Engine page was updated December 23, 2006)
My next step is to tune the legs mechanically, and then fine tune the CrustCrawler walking engine. After that, I have a number of "conceptual" ideas described here.