
Walk and Crab Video (12 meg MOV)
Walk and Spin Video (13 meg MOV)
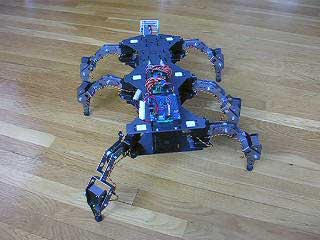
Propeller Powered HexCrawler HDATS (by Steve Norris)
I have my new Hexcrawler HDATS up and walking. I'm using the new Parallax Propeller Proto board instead of the usual Basic Stamp/BOE. At minimum, all you need to do is add a jumper, a wire and a 3 pin header to get it to work with the two PSC's. I configured the servos and batteries just as I did for the Nomad GaitPIC. Everything is running in the Propeller (Look Ma, no GaitPIC!) and written in Spin.
The walking engine software is capable of walking forward, backward, left/right turns, spins and crabbing. The code for this reusable walking engine is below.
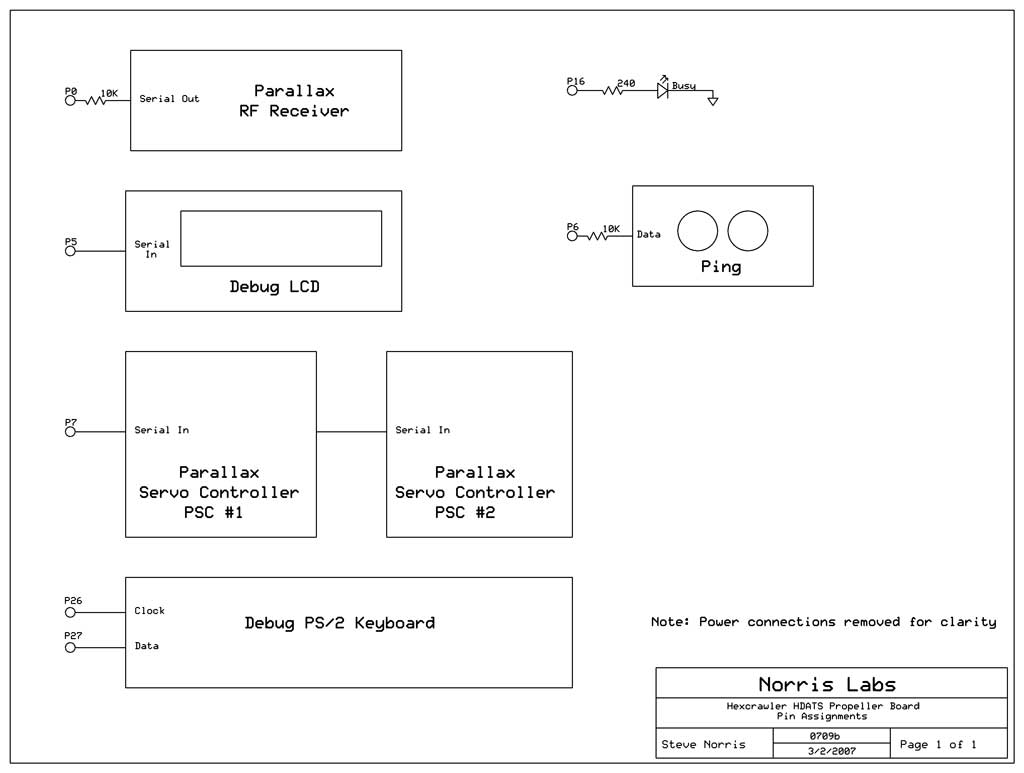
The proto board comes prewired for a PS/2 keyboard (as well as a mouse and VGA monitor). I installed the connector for the keyboard and added a 3 pin header for a serial LCD display. I used them both for gait development and debugging.
I've added an S3 with a Ping ultrasonic sensor to the front end. It provides front crash protection. To control this machine I also installed a Parallax RF Receiver. I use my Remote Keyboard (see my previous posts) to send remote commands. The Spin code for the remote control is below.
Here are the videos, diagrams and code. Refer to the Nomad pages for servo and power wiring diagrams.
Walk and Crab Video (12 meg MOV) |
Walk and Spin Video (13 meg MOV) |
Propeller Pin Assignment Diagram
Remote Control with Ping Spin code
Here is a closeup view of the Propeller Proto board, RF receiver, Servo Controllers and battery indicators. Like my Nomad I've installed two 3300mah batteries on the lower deck. I use a DPDT switch to control power to the servos. A 1600mah battery mounted under the proto board provides all the power to the electronics. The proto board has its own built-in power switch.

{kind=link}